MultiScanRegistration源码分析¶
Note
参考:http://wiki.ros.org/loam_velodyne
https://github.com/laboshinl/loam_velodyne
http://www.frc.ri.cmu.edu/~jizhang03/Publications/RSS_2014.pdf
LOAM 的整体思想就是将复杂的 SLAM 问题分为:1. 高频的运动估计;2. 低频(低一个数量级)的环境建图。整个系统的框架如图:
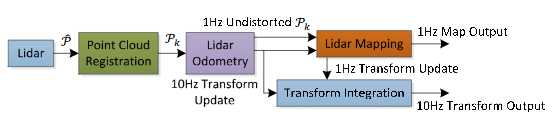
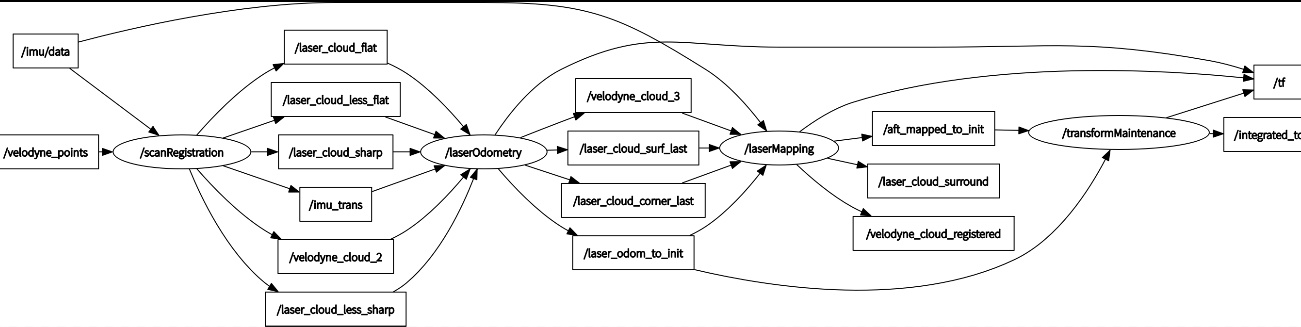
Lidar 接收数据,首先进行 Point Cloud Registration,Lidar Odometry 以 10Hz 的频率进行运动估计和坐标转换,Lidar Mapping 以 1Hz 的频率构建三维地图。这样做主要是为了保证系统的实时性。下面再来看看 rqt 节点图:
MultiScanRegistration 主要实现多种激光类型类,继承 ScanRegistration, 具体激光数据由 ScanRegis-tration 处理
class MultiScanRegistration : virtual public ScanRegistration {
组合类 MultiScanMapper, 实现激光配置, 包括垂直方向最低,最高角度,线数。
MultiScanMapper _scanMapper; ///< mapper for mapping vertical point angles to scan ring IDs
MultiScanMapper(const float& lowerBound = -15,
const float& upperBound = 15,
const uint16_t& nScanRings = 16);
节点调用逻辑, 首先 ros 节点初始化->MultiScanRegistration 对象初始化-> 调用 setup, 初始化激光配置,订阅激光数据,调用 ScanRegistration::setup 发布边特征点云,平面特征点云,抽取特征后的总点云,imu_trans-> 点云 callback() 调用 process() 为点云特征抽取做准备-> 调用 extractFeatures() 抽取点云特征-> 发布。后续几个节点调用逻辑类似:
/** Main node entry point. */
int main(int argc, char **argv)
{
ros::init(argc, argv, "scanRegistration");
ros::NodeHandle node;
ros::NodeHandle privateNode("~");
loam::MultiScanRegistration multiScan;
if (multiScan.setup(node, privateNode)) {
// initialization successful
ros::spin();
}
return 0;
}
重点介绍 process() 函数
void MultiScanRegistration::process(const pcl::PointCloud<pcl::PointXYZ>& laserCloudIn,
const ros::Time& scanTime)
{
size_t cloudSize = laserCloudIn.size();
// reset internal buffers and set IMU start state based on current scan time
reset(scanTime);
// determine scan start and end orientations计算激光的起始位置,终止位置
float startOri = -std::atan2(laserCloudIn[0].y, laserCloudIn[0].x);
float endOri = -std::atan2(laserCloudIn[cloudSize - 1].y,
laserCloudIn[cloudSize - 1].x) + 2 * float(M_PI);
if (endOri - startOri > 3 * M_PI) {
endOri -= 2 * M_PI;
} else if (endOri - startOri < M_PI) {
endOri += 2 * M_PI;
}
bool halfPassed = false;
pcl::PointXYZI point;
std::vector<pcl::PointCloud<pcl::PointXYZI> > laserCloudScans(_scanMapper.getNumberOfScanRings());
// extract valid points from input cloud从点云中提取可用的点
for (int i = 0; i < cloudSize; i++) {
point.x = laserCloudIn[i].y;
point.y = laserCloudIn[i].z;
point.z = laserCloudIn[i].x;
// skip NaN and INF valued points过滤掉点云中错误的值
if (!pcl_isfinite(point.x) ||
!pcl_isfinite(point.y) ||
!pcl_isfinite(point.z)) {
continue;
}
// skip zero valued points过滤激光周围的点
if (point.x * point.x + point.y * point.y + point.z * point.z < 0.0001) {
continue;
}
// calculate vertical point angle and scan ID
float angle = std::atan(point.y / std::sqrt(point.x * point.x + point.z * point.z));//计算垂直方向角度,这里有一个旋转轴问题,x(z),y(x),z(y)
int scanID = _scanMapper.getRingForAngle(angle);//计算激光线束
if (scanID >= _scanMapper.getNumberOfScanRings() || scanID < 0 ){//范围0-15
continue;
}
// calculate horizontal point angle
float ori = -std::atan2(point.x, point.z);//计算水平角度
if (!halfPassed) {
if (ori < startOri - M_PI / 2) {
ori += 2 * M_PI;
} else if (ori > startOri + M_PI * 3 / 2) {
ori -= 2 * M_PI;
}
if (ori - startOri > M_PI) {
halfPassed = true;
}
} else {
ori += 2 * M_PI;
if (ori < endOri - M_PI * 3 / 2) {
ori += 2 * M_PI;
} else if (ori > endOri + M_PI / 2) {
ori -= 2 * M_PI;
}
}
// calculate relative scan time based on point orientation
float relTime = _config.scanPeriod * (ori - startOri) / (endOri - startOri);
point.intensity = scanID + relTime;//点intensity域,整数部分为scanID,小数部分为扫描时间,这样就完成点云中每个点分类
// project point to the start of the sweep using corresponding IMU data
if (hasIMUData()) {
setIMUTransformFor(relTime);
transformToStartIMU(point);
}
laserCloudScans[scanID].push_back(point);
}
// construct sorted full resolution cloud
cloudSize = 0;
for (int i = 0; i < _scanMapper.getNumberOfScanRings(); i++) {
_laserCloud += laserCloudScans[i];//把整理好后的点云,按照激光束的线序存储在_laserCloud点云中。
IndexRange range(cloudSize, 0);
cloudSize += laserCloudScans[i].size();
range.second = cloudSize > 0 ? cloudSize - 1 : 0;
_scanIndices.push_back(range);//整理好后的点云索引,second??,16个pair中,每个pair,first代表每一束激光点云起始位置,second代表每一束激光的终点位置
}
// extract features
extractFeatures();
// publish result
publishResult();
}
接下来就交给 ScanRegistration 处理抽取边特征,平面特征, 函数 extractFeatures();